Soft Robotics Posture Supporting Exosuit
Related Skills
Biomechanics, Soft Robotics, Ergonomics
Project Name
This is your Project description. Provide a brief summary to help visitors understand the context and background of your work. Click on "Edit Text" or double click on the text box to start.
BACKGROUND
Soft Robotics
Soft robotics is a field of robotics that focuses on designing robots with flexible or soft parts that can interact with the environment and people in a safe and intuitive way. The Soft Robotics Tookit website was a great open source resource the helped guide the development of some of the soft-robotics components.
Exosuit Idea
Since soft robotics are more pliable and lighter than traditional hard robotics, our group was interested in exploring how soft-robotics could be used for human-machine interactions. We narrowed down our scope of interest to the interplay between soft-robotics and biomechanics, settling on the question of, "would an exosuit using soft robotics components be effective at supporting posture and preventing back injury?"
With the support of Professor James Intrilligator and the Tufts University Human Factors Engineering Lab, we began to recruit other interested researchers to the project. In order to stay organized and streamline research efforts we created 3 teams - Soft Robotics (led by Maya Kurzman & Eric Wu Fang Yu), Biomechanics (led by William Liu), and Design (led by myself).
Goal
The goal of this project was to design a bio-conscious system that used soft-robotics to resolve the problems of traditional posture correcting devices
MOTION & FATIGUE TRACKING
The first goal of our project was to better understand what effects poor posture has on muscle fatigue and what range of movements we may need our design to compensate for.
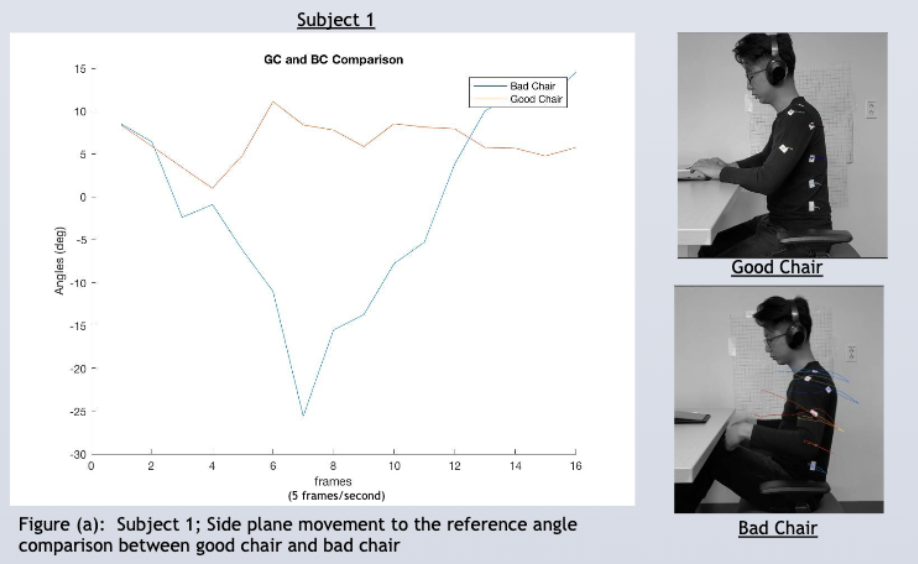
For each phase of analysis we studied and analyzed participant's posture over 30 minutes while they sat and did work. Two chair seats were used in these trials, an ergonomic office chair ("good chair") and a stool ("bad chair"). Participants were asked to wear an EMG shirt in order to provide reference data on muscle fatigue and tension.
In Phase 1 we used passive motion tracking through image processing analysis to monitor and study participants’ posture.
For Phase 2 we switched to inertial measurement unit system-based motion tracking (up to 500Hz) for higher resolution.
Phase 3 used the same analysis methods as Phase 2 but focused specifically on horizontal movement along the spine.
Finally, in Phase 4, we experimented with using WearNotch sensors to help improve data resolution and to simplify the experiment process.


DESIGN & PROTOTYPING
Design
In the early research phase of this project, we identified that half of all the Americans have back pain, a leading cause of which is poor posture. Our overall goal was to use bio-inspired design concepts to create a soft robotics posture correcting exosuit that can unobtrusively improve people’s quality of life. To accomplish this, we conducted user research, examined the anatomy of the back, tested several posture correcting devices and analyzed their designs. In addition, we assessed literature on muscle relief practices. Finally we conducted the above experiments to gather motion capture data on back fatigue and sitting posture.
These findings informed our final design and were presented by myself, William, and team member Ali Brodeur at the annual School of Engineering Poster Session.
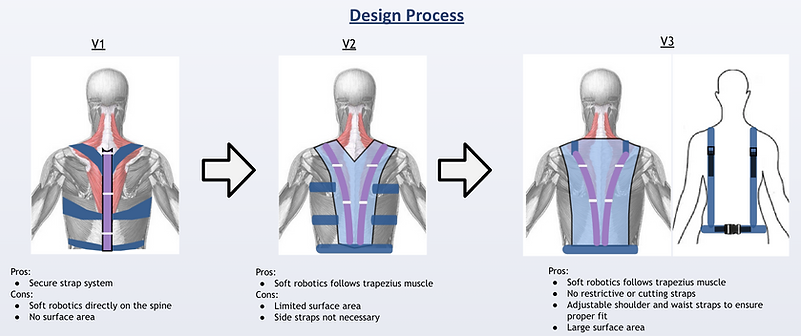
Prototyping
In the prototype phase of the project, using an EKG shirt as the base layer, we experimented with different custom shapes for our silicon soft robotics and tested how their forms responded when hooked up to a pneumatic system. The EMG shirt was used as the prototype base because the embedded electrodes supplied reading of upper body EMG signals and the form provided sufficient housing and compression for the soft-robotics components.


